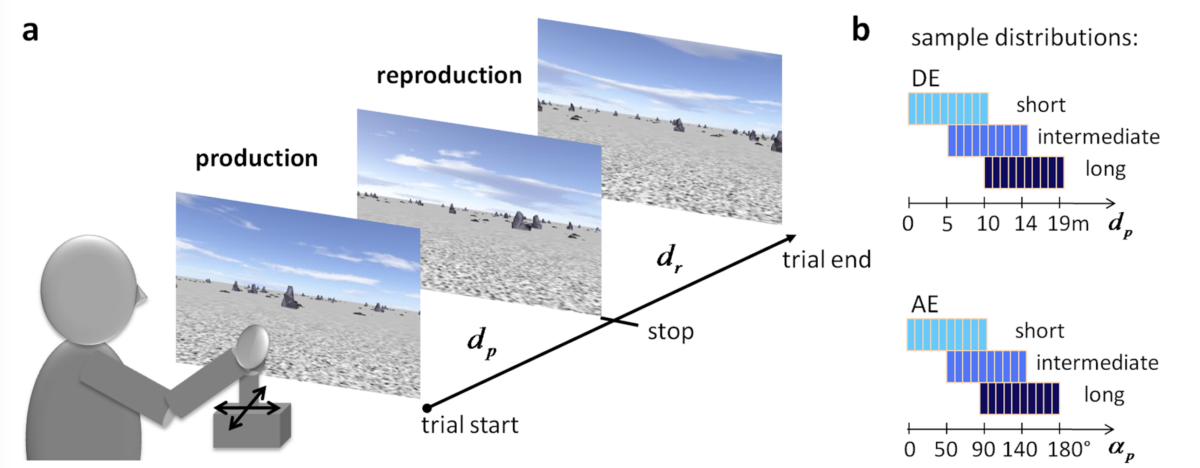
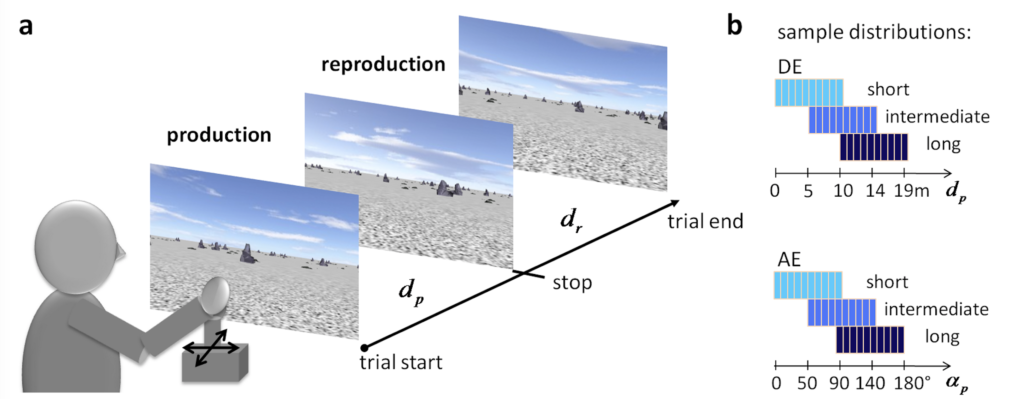
In the paper listed below, participants were invited to return on seperate days and to test the effect of prior experience only, the settings for the three conditions were the same except that the sample distances were drawn from three different underlying uniform sample distributions, specified as small displacements (dp = [1, 2, 3, 4, 5, 6, 7, 8, 9, 10] m), intermediate displacements (dp = [5, 6, 7, 8, 9, 10, 11, 12, 13, 14] m) and large displacements range (dp = [10, 11, 12, 13, 14, 15, 16, 17, 18, 19] m).
The sample distributions of the three conditions were chosen to be partially overlapping to test whether displacement estimation behavior differed significantly for the same sample stimulus depending on the previously experienced displacements. Participants had no knowledge about the amount of displacement they had to reach during the production phase and were naive to the condition in which they were tested.
Turning angle estimation experiment. The stimulus and settings in the angle estimation (AE) experiment were identical to the distance estimation (DE) experiment, with the following exception: participants turned
on the spot to a previously indicated direction. Turning direction was kept constant between production and reproduction to preclude the use of external cues to solve the task. The sample turning angles, alpha_p, for the three prior experience conditions were in analogy drawn from three different sample distributions specified as small displacements (alpha_p = [10, 20, 30, 40, 50, 60, 70, 80, 90, 100]°), intermediate displacements (alpha_p = [50, 60, 70, 80, 90, 100, 110, 120, 130, 140]°) and large displacements range
(alpha_p = [90, 100, 110, 120, 130, 140, 150, 160, 170, 180]°). All participants performed both types of experiment. The three conditions for DE and AE were tested in separate sessions, resulting in six test
sessions per participant.
Each session lasted between 45 and 60 min and was composed of 200 trials. The first 20 training trials per experimental condition served to familiarize participants with the VR. Feedback on the performance was given after the reproduction by displaying an object in the VR at the correct distance or turning angle and asking subjects to navigate toward this location. In the following 180 test trials, no feedback was given. Only test trials were used for data analysis. Two sessions of the same experiment type, AE or DE, were separated by at least 1 h and up to a few days. Within sessions, participants had a short break of 100 s after
100 and 150 trials. Each sample displacement was repeated 20 times per condition in randomized order. The same trial order within one condition was maintained for all participants. The order in which the three conditions for DE and AE were tested was randomized for each participant.